Découvrir la section..
Ressources
Projets
Connexion
Vous n´êtes pas identifié(e).
Projet bouée de houle Raspberry pi à la Seyne sur Mer

On
veut installer une Bouée Marine à la
Seyne/mer situées en Méditerranée. Les bouées météorologiques
"ancrées" reliées par un long câble fixé au fond de l’eau transmettent
les principales données météo des conditions en mer (large ou côtes)
par liaison radio. Les données météo comprennent notamment (selon les
modèles de bouées) les températures (eau et air), l'hygrométrie,
l'orientation et la vitesse du vent, les hauteurs, périodes et
étalement de vagues .Ces données sont mises à jour en moyenne toutes
les 30 à 60 minutes. Pour notre projet nous nous limiterons uniquement
à la mesure de la houle.
Les données de houles sont les
suivantes :
Hauteur significative : la hauteur significative de vagues est la hauteur moyenne du tiers supérieur des hauteurs de vagues enregistrées durant la période d'échantillonnage (en général 20 minutes).
Hauteur maximale : la hauteur
maximale est la hauteur de la plus haute vague pendant la période
d'échantillonnage. Statistiquement, la hauteur maximale est 2 fois la
hauteur significative.
Période : la période est considérée
comme l'intervalle en secondes entre deux vagues. Plus la période est
longue, plus les vagues seront consistantes. Une houle avec une longue
période (>7 sec.) est souvent générée par une dépression au large
(groundswell). Une houle avec une courte période (<=7 sec.) est
souvent une houle de vent générée proche des côtes (windswell).
L'importance de la période est souvent sous-estimée - une houle de 1m à
10 secondes d'intervalle est pourtant perçue comme plus "grosse" que
1m20 à 5 secondes! En revanche, selon les spots et leur exposition, une
longue période peut générer des vagues qui "ferment". La période significative, c'est la moyenne du tiers
supérieur des périodes enregistrées.
Direction : elle est la direction
principale de la houle. Pour qu'il y ait des vagues, la direction doit
venir du large vers la côte. Mais attention : une direction de la houle
parfaitement perpendiculaire à la côte peut générer des vagues qui ont
tendance à fermer.
Etalement : l'étalement est la
variation de la direction du spectre de la houle autour de la direction
principale. Un faible étalement (<=25°) signifie souvent une houle
de relative qualité. Plus l'étalement est faible, plus l'orientation de
la houle est unidirectionnelle. Au contraire, plus la valeur de
l'étalement est grande, plus elle est multidirectionnelle.
Cahier des charges
1- Pour connaitre la hauteur de vagues maximales, significative et période nous utiliserons un capteur altimètre de précision en i2c.
2- Pour la position de la bouée, la direction et l’étalement de la
houle nous utiliserons un
GPS en I2c, le câble de fixation est suffisamment long pour que la bouée
puisse
se déplacer de plusieurs dizaine de mètres(70m max) autour de son axe.
3- La bouée devant être autonome de longs mois vous utiliserez
un microcontrôleur et non Raspberry pi pour la gestion de ces capteurs. Une
des raisons évidentes de ce choix est de limiter le plus possible la
consommation énergétique du système mais comme vous vous êtes dans le
cadre d’un projet vous devrez néanmoins le justifier. 4-
dimensionnement d’une batterie pour la bouée avec un panneau solaire.
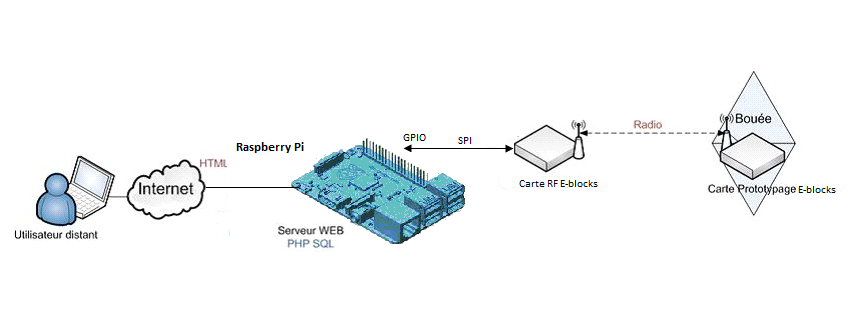
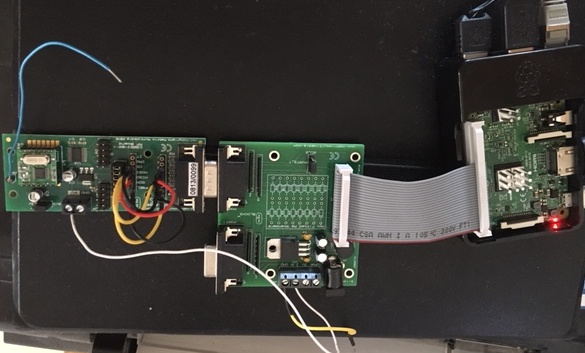
5- Les mesures sont transmises en temps réel par radio
RF E-Blocks EB063 (233 MHz) au Raspberry.
-
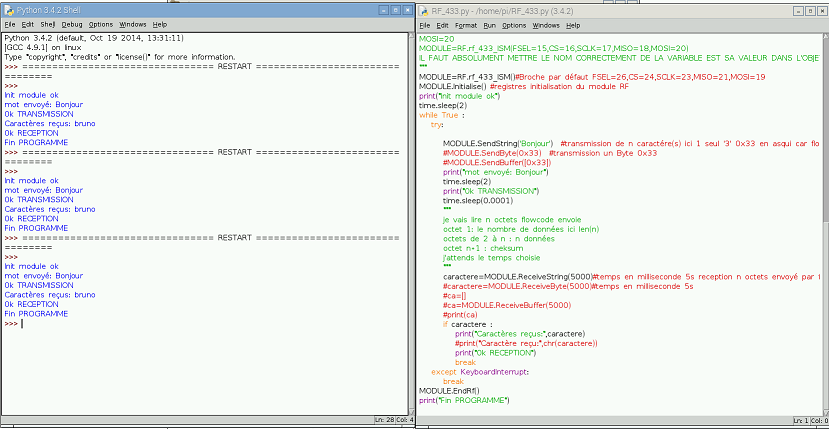
Coté Raspberry py en Python 3
-
Coté E-blocks en Flowcode 6
Les mesures du capteur altimètre de précision et du
GPS seront traitées sur le Raspberry pi en python3 il est plus facile
de calculer
avec ce micro pc la hauteur de vagues maximales, hauteur significative
et
période, la direction et l’étalement qu’avec un microcontrôleur.
Les parties mathématiques et gestion du RF en spi étant trop compliquées pour des élèves de terminale SIN j’ai développé des modules python3 avec tuto pour le RF, altimètre, direction et étalement voici un
Exemple direction/étalement:  Ici le PI trouve toute sa place.
Ici le PI trouve toute sa place.
6- Mise en place d’une base de données MySQL sur le Raspberry pi les mesures seront stockées en moyenne toutes les 20 à 60 minutes, Hauteur significative,Hauteur maximale, Période, Direction, Etalement, date et heure (python3).
7- Site web qui permet à l’utilisateur de visualiser les différentes mesures de houle en temps réels en les affichant sous formes de courbe avec la librairie RGraph.
8- Création fichier format GPX pour une lecture facile sur une carte en ligne du déplacement de la bouée autour de son axe (python3).
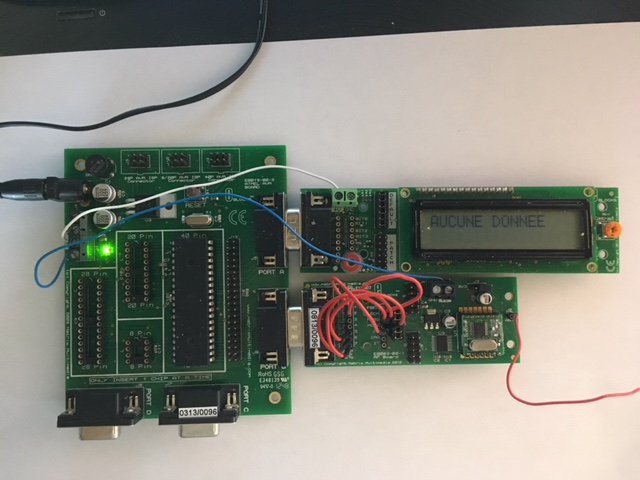
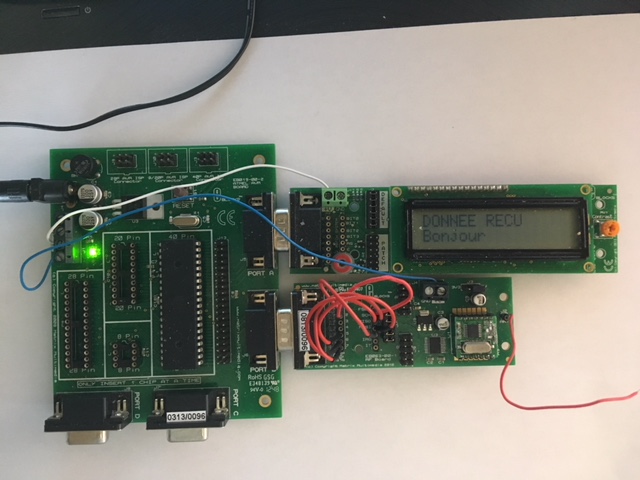
Projet élèves
(Test MATERIEL)
REALISATION 2019!